Koło zębate. Główne parametry. Rysowanie
Żaden dobry mechanizm nie może być zbudowany bez takich szczegółów jak koło zębate (lub inaczej koło zębate). Właściwe zrozumienie wpływu przekładni na takie parametry, jak moment obrotowy i prędkość obrotowa jest bardzo ważne. Poniżej dowiesz się o podstawach kół zębatych i ich prawidłowym używaniu.
Zaleta mechaniczna: moment obrotowy a prędkość obrotowa
Gears działają na zasadzie przewagi mechanicznej. Oznacza to, że za pomocą kół zębatych o różnych średnicach można zmienić prędkość obrotową wału wyjściowego i moment obrotowy opracowany przez silnik napędowy.
Każdy silnik elektryczny ma pewną prędkość obrotową i moment obrotowy odpowiadający jej mocy. Niestety, w przypadku wielu mechanizmów, silniki asynchroniczne oferowane na rynku i odpowiednie pod względem kosztów zwykle nie mają pożądanego stosunku między prędkością i momentem obrotowym (wyjątkami są serwonapędy i motoreduktory o wysokim momencie obrotowym). Czy na przykład chcesz, aby koła robota czyszczącego obracały się z prędkością 3000 obrotów na minutę przy niskim momencie obrotowym? Nie, oczywiście, więc ten drugi jest często lepszy od prędkości. 
Równanie biegów
Wymienia dużą prędkość wejściową, aby uzyskać większy moment wyjściowy. Wymiana odbywa się na bardzo prostym równaniu, które można zapisać jako:
Moment wejściowy * Prędkość wejściowa = moment wyjściowy * Prędkość wyjściowa
Prędkość wejściową można znaleźć po prostu patrząc na płytę silnika napędu. Moment wejściowy można łatwo zidentyfikować dzięki tej prędkości i mocy mechanicznej z tej samej płyty. Następnie po prostu zastąp prędkość wyjściową lub wymagany moment po prawej stronie równania.
Ad
Załóżmy na przykład Twój silnik asynchroniczny w tej chwili na wale wyjściowym 0,5 N ∙ m ma prędkość 50 obr / sek, ale potrzebujesz tylko 5 obrotów / sek. Twoje równanie będzie wyglądać następująco:
0,5 N ∙ m * 50 obr / s = moment wyjściowy * 5 obr / sek.
Twój wyjściowy moment obrotowy wyniesie 5 N ∙ m.
Załóżmy teraz, że przy tym samym silniku potrzebujesz 5 N ∙ m, ale wymagana jest minimalna prędkość 10 obrotów na sekundę. Jak byś wiedział, czy twój silnik jest w stanie to zrobić za pomocą przekładni (to znaczy, w rzeczywistości, motoreduktora)? Przejdź ponownie do naszego równania
0,5 N ∙ m * 50 obr / s = 5 N ∙ m * Prędkość wyjściowa ,
Prędkość wyjściowa = 5 obr / sek.
Tak więc, używając prostego równania, ustaliliście, że przy wskaźniku momentu wyjściowego = 5 N ∙ m, wasz bieg wyjściowy nie jest w stanie zapewnić prędkości wyjściowej 10 obr / s. Po prostu zaoszczędziłeś sobie dużo pieniędzy, ponieważ nie wydałeś go na mechanizm, którego nigdy byś nie zarobił. 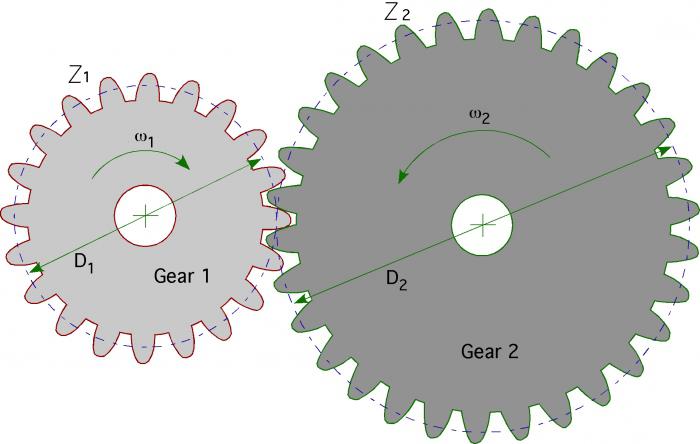
Przełożenie przekładnia
Zapisaliśmy równania, ale w jaki sposób mechanicznie zamieniamy moment obrotowy i prędkość? Do tego potrzebujemy dwóch kół zębatych (czasami więcej) o różnych średnicach, aby mieć określony przełożenie skrzyni biegów. W dowolnej parze kół zębatych większe koło zębate porusza się wolniej niż mniejsze, ale przenosi większy moment obrotowy na wał wyjściowy. Zatem im większa różnica (lub przełożenie) pomiędzy dwoma kołami, tym większa różnica w ich prędkościach i przenoszonych momentach obrotowych.
Ad
Wskaźnik przełożenia pokazuje, ile biegów zmienia prędkość i moment obrotowy. Dla niego znowu istnieje bardzo proste równanie.
Załóżmy, że przełożenie wynosi 3/1. Oznacza to trzykrotne zwiększenie momentu obrotowego i trzykrotną prędkość.
Przykład:
Moment wejściowy = 1,5 N ∙ m, prędkość wejściowa = 100 obr / s,
Stosunek = 2/3
Moment wyjściowy = Moment wejściowy * 2/3 = 1 N m,
Prędkość wyjściowa = prędkość wejściowa * 3/2 = 150 obr / s.
Tak więc na wyjściu przekładni moment zwiększył się półtora raza, a prędkość spadła w ten sam sposób.
Osiągnięcie określonego przełożenia
Jeśli chcesz osiągnąć prostą wartość, powiedz 2 do 1, musisz użyć dwóch biegów, z których jeden jest dwa razy większy od drugiego. Jest to tylko stosunek ich średnic. Jeśli średnica koła zębatego jest trzykrotnie większa od średnicy innej przekładni, otrzymasz przełożenie 3/1 (lub 1/3).
Ad
Aby uzyskać dokładniejszy sposób obliczania przełożenia, obliczyć stosunek zębów na zębatkach. Jeśli jeden z nich ma 28 zębów, a drugi 13, otrzymasz przełożenie 28/13 = 2,15 lub 13/28 = 0,46. Liczenie zębów zawsze da ci najdokładniejszą wartość.
Wydajność przekładni
Niestety, w przekładni zębatej masz pewne straty energii. Wynika to z oczywistych przyczyn, takich jak tarcie, niewspółosiowość kątów ciśnień, smarowanie, luzy (odległość między sprzężonymi zębami dwóch kół zębatych), jak również momenty kątowe itp. Różne typy kół zębatych, różne rodzaje kół zębatych, różne materiały i zużycie kół zębatych, - wszystko to wpłynie na wydajność transmisji. Ich możliwe kombinacje dadzą zbyt dużą listę, więc dokładna wartość skuteczności transferu, którą stosujesz, znajduje się w dokumentacji dla niego.
Ad
Załóżmy, że używasz dwóch przekładni czołowych. Normalna wydajność takiej transmisji wynosi około ~ 90%. Pomnóż tę liczbę przez prędkość wyjściową i wyjściowy moment obrotowy, aby uzyskać rzeczywiste wartości wyjściowe transmisji.
Jeśli (z poprzedniego przykładu):
Stosunek = 2/3
Moment wyjściowy = Moment wejściowy * 2/3 = 1 N m,
Prędkość wyjściowa = prędkość wejściowa * 3/2 = 150 obr / s,
następnie
Rzeczywisty moment wyjściowy = 1 N ∙ m * 0,9 = 0,9 N ∙ m,
Rzeczywista prędkość wyjściowa = 150 obr / sek * 0,9 = 135 obr / sek.
Kierunek obrotów kół zębatych
Rozwijając dowolny sprzęt, musisz zrozumieć, w jaki sposób zmienia on kierunek obrotu wału wyjściowego. Dwie sprzężone koła będą zawsze obracać się w przeciwnych kierunkach. Oznacza to, że jeśli obróci się zgodnie z ruchem wskazówek zegara, drugi zawsze obróci się przeciwko niemu. Jest to dość oczywiste. Ale co, jeśli masz sprzęt, powiedzmy, sześciu zazębiających się narzędzi? Zasada jest następująca: wałki wejściowe i wyjściowe dla biegów z nieparzystą liczbą kół zawsze obracają się w jednym kierunku, a dla parzystej liczby biegów - w przeciwnym kierunku.
Ad
Konstrukcja przekładni i parametry
Zawiera koronę z zębami, dyskiem i piastą. Istnieją trzy najważniejsze parametry: moduł, średnica koła podziałowego i liczba zębów. Co to jest koło skoku ma koło zębate? Rysunek cylindrycznego koła z typowymi zębami ewolwentowymi pokazano poniżej. 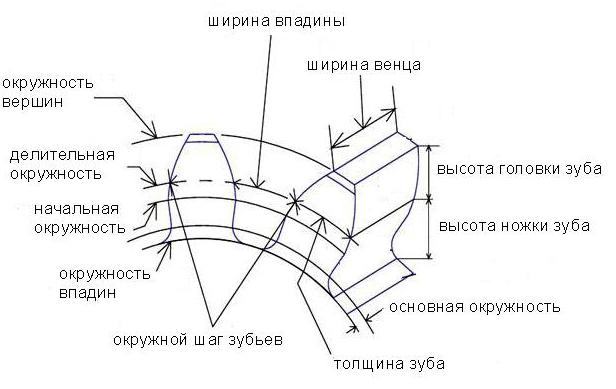 Koło podziałki jest przedstawione liniami przerywanymi. Zwyczajowo określa się obwodowe skoki zębów p (rozstaw kół zębatych), to jest część jego długości na jeden ząb, a moduł zębaty m jest częścią średnicy koła podziałowego d na jeden ząb. Aby to obliczyć, użyj poniższej formuły:
Koło podziałki jest przedstawione liniami przerywanymi. Zwyczajowo określa się obwodowe skoki zębów p (rozstaw kół zębatych), to jest część jego długości na jeden ząb, a moduł zębaty m jest częścią średnicy koła podziałowego d na jeden ząb. Aby to obliczyć, użyj poniższej formuły:
m = d / z = p / 3,14 mm.
Na przykład koło zębate z 22 zębami i średnicą 44 mm ma moduł m = 2 mm Sprzężone koła zębate muszą mieć jeden moduł. Ich wartości są standaryzowane, a tuż przy kręgu pitch moduł danego koła przyjmuje swoją standardową wartość.
Wysokość głowy zęba jednego koła jest mniejsza niż wysokość nogi zęba drugiego, która się z nim sprzęga, tworząc w ten sposób luz promieniowy c .
Aby zapewnić boczny luz δ między dwoma zazębiającymi się ząbkami, należy je sumować grubości są mniejsze niż ich obwodowe skoki Promieniowy i bok zapewniono szczeliny w celu stworzenia warunków niezbędnych do smarowania, normalnej pracy przekładni z nieuniknionymi niedokładnościami podczas produkcji i montażu, termicznego zwiększenia wielkości przekładni itp.
Kalkulacja biegów
Jest on zawsze przeprowadzany w ramach obliczania konkretnego ciągu przekładni. Dane początkowe to zazwyczaj moc (lub moment obrotowy), prędkości kątowe (lub prędkość jednego wału i przełożenia), warunki pracy (rodzaj ładunku) i żywotność przekładni.
Dalsza procedura dotyczy zamkniętej przekładni czołowej.
1. Określenie przełożenia skrzyni biegów u .
2. Dobór materiałów ściernic w zależności od warunków pracy, celu obróbki cieplnej i twardości powierzchni roboczych zębów.
3. Obliczanie zębów zginania transferowego.
4. Obliczanie zębów przekładni na wytrzymałość styku (wytrzymałość stykających się powierzchni zębów).
5. Wyznaczanie osiowego odstępu W od stanu siły kontaktu i zaokrąglenia jego wartości do normy.
6. Ustawienie modułu z relacji m = (0,01 - 0,02) x a W i zaokrąglenie jego wartości do najbliższej wartości standardowej. W tym przypadku, w przenoszeniu mocy pożądane jest, aby m ≥ 1,5 - 2 mm.
7. Ustalenie całkowitej liczby zębów koła zębatego, liczby zębów koła zębatego i koła.
8. Wybór współczynników kształtu zębów dla koła zębatego i koła.
9. Sprawdź wytrzymałość zębów na naprężenia zginające.
10. Przeprowadzenie obliczenia geometrycznego przelewu.
11. Wyznaczanie prędkości obwodowej koła i wyznaczenie odpowiedniego przekładni precyzyjnej.
Obliczenie biegu w składzie otwartego koła różni się nieco od powyższego, ale zasadniczo sekwencja jest taka sama.
Jak wskazano wytwarzanie precyzyjnych narzędzi?
Przy wytwarzaniu któregokolwiek z ich typów występuje szereg błędów, spośród których istnieją cztery główne:
- błąd kinematyczny związany głównie z promieniowym biciem kół zębatych;
- błąd gładkości pracy spowodowany odchyleniami stopnia i profilu zębów;
- błąd stykowy zębów w przekładni, który charakteryzuje kompletność dopasowania ich powierzchni do sprzęgnięcia;
- prześwit między niedziałającymi powierzchniami zębów.
Aby kontrolować pierwsze trzy błędy, standardy ustanawiają specjalne wskaźniki - stopnie dokładności od 1 do 12, a dokładność produkcji wzrasta wraz ze spadkiem indeksu. Aby kontrolować czwarty błąd produkcyjny, istnieją dwa wskaźniki:
- typ przekładni sprzęgających - oznaczonych literami A, B, C, D, E, H;
- Tolerancja luzu bocznego - oznaczona przez x, y, z, a, b, c, d, e, h.
W przypadku obydwu wskaźników prześwitu bocznego symbole są podawane w malejącej kolejności w zakresie ich wielkości i tolerancji.
Zwykle dokładność biegów jest wskazana na dwa sposoby. Jeśli stopień dokładności w pierwszych trzech błędach jest taki sam, wówczas podaje się jeden wspólny wskaźnik liczbowy stopnia dokładności, a następnie litery wskazujące rodzaj interfejsu i tolerancję dla prześwitu bocznego. Na przykład:
8-Ac GOST 1643 - 81.
Jeśli dokładność w pierwszych trzech błędach jest różna, to trzy wskaźniki liczbowe są umieszczane w oznaczeniu sekwencyjnie. Na przykład:
5-4-3-Sa GOST 1643 - 81.
Rodzaje kół zębatych
Wszelkie narzędzia, niezależnie od ich rodzaju, są wykonywane i działają zgodnie z tymi samymi zasadami opisanymi powyżej. Jednak ich różne typy pozwalają wykonywać różne zadania. Niektóre rodzaje przekładni mają albo wysoką sprawność, albo wysoki przełożenie, albo pracują z nierównoległymi osiami obrotu przekładni, na przykład. Oto główne typowe typy. To nie jest pełna lista. Możliwe jest również połączenie poniższych typów.
Uwaga: Podana jest tylko typowa sprawność przekładni. Ze względu na wiele innych możliwych czynników podane wartości efektywności powinny być wykorzystywane jedynie jako wartości referencyjne. Producenci często zapewniają oczekiwaną wydajność w paszportach swoich programów. Pamiętaj, że zużycie i smarowanie również znacząco wpłyną na wydajność przekładni.
Cylindryczne koła zębate (sprawność ~ 90%)
Cylindryczna przekładnia ma zęby umieszczone na cylindrycznej powierzchni. Transfery z nimi są najczęściej używanymi typami ze względu na ich prostotę i maksymalną wydajność wśród wszystkich innych. Przełożenie dla jednej pary u ≤ 12,5. Nie jest zalecany do bardzo dużych obciążeń, ponieważ proste zęby koła zębatego łatwo pękają. 
Cylindryczne koła zębate śrubowe (sprawność ~ 80%)
Działają one w taki sam sposób, jak cylindryczna zębatka, aby przenieść moment między równoległymi wałami, ale taka przekładnia działa bardziej płynnie. W rezultacie powodują mniejszy hałas podczas pracy i mają mniejsze wymiary. Mają dużą ładowność. Niestety, ze względu na złożony kształt zębów, są one zazwyczaj droższe. 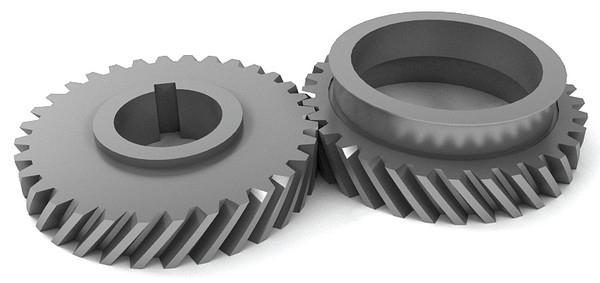
Cylindryczne koła chevronowe
Są odmianą poprzedniego gatunku. Jaka jest różnica koła zębatego. Rysunek tego jest pokazany poniżej. Widać, że zęby z prawym i lewym nachyleniem są rozmieszczone wzdłuż szerokości korony, tak że takie kompozytowe zęby koła zębatego przypominają "jodełkowate" w kształcie. Koła te mają wszystkie zalety ich spiralnego wyglądu oraz braku obciążeń osiowych. Są w stanie wyśrodkować się i nie potrzebują drogich łożysk skośnych do postrzegania obciążeń osiowych.
Przekładnie stożkowe (sprawność ok. 70%)
Zęby tych kół, które znajdują się na powierzchniach stożkowych, wykonują proste, ukośne, okrągłe (łukowate). Te koła zębate służą do przenoszenia momentu między wałami przecinającymi się pod różnymi kątami. Niestety, ich wydajność jest raczej niska, więc ich użycie powinno być w miarę możliwości unikane. 
Przekładnia ślimakowa (Efektywność ~ 70%)
Jest to przekładnia ślimakowa na jednym wale i ślimak na drugim, prostopadle do pierwszego wału. Mają bardzo wysoki przełożenie. Obliczenia uwzględniają fakt, że robak (w jedną stronę) ma tylko jeden ząb (obrót).  Inną zaletą przekładni ślimakowej jest to, że ma tylko jeden kierunek obrotu. Oznacza to, że tylko silnik napędowy może obracać takim kołem zębatym, podczas gdy grawitacja lub inne siły stron trzecich nie spowodują żadnych obrotów. Jest to przydatne na przykład do blokowania ładunku na wysokości.
Inną zaletą przekładni ślimakowej jest to, że ma tylko jeden kierunek obrotu. Oznacza to, że tylko silnik napędowy może obracać takim kołem zębatym, podczas gdy grawitacja lub inne siły stron trzecich nie spowodują żadnych obrotów. Jest to przydatne na przykład do blokowania ładunku na wysokości.