Co to jest odbiornik GPS: opis i zasada działania
Prawdopodobnie wszyscy korzystali z odbiorników GPS bezpośrednio lub pośrednio. Można je znaleźć w większości smartfonów, wielu nowych samochodów, używanych do celów komercyjnych na całym świecie. Te niewielkie urządzenia mogą błyskawicznie i całkowicie dowolnie określać dokładną lokalizację i czas w dowolnym miejscu na świecie. Wszystko, co jest potrzebne do tego, to obecność samego odbiornika GPS, a stają się one coraz tańsze i mniejsze każdego dnia.
Jednak te małe i niedrogie moduły nie powinny być brane za pewnik. Aby zawsze i wszędzie móc dokładnie określić lokalizację, minęły dziesięciolecia rozwoju technicznego. Od końca lat 70. uruchomiono dziesiątki satelitów GPS, z których każdy jest wyposażony w precyzyjny zegar atomowy, i są one regularnie wprowadzane na orbitę wokół Ziemi. Ciągle przesyłają dane na Ziemię za pośrednictwem dedykowanych kanałów RF. Kieszonkowe odbiorniki GPS są wyposażone w maleńkie anteny i procesory, które bezpośrednio odbierają sygnał wysyłany przez satelity i obliczają pozycję i czas w locie.
Jak działa GPS?
Grupy orbitalne i stacje naziemne są używane do określania pozycji i czasu prawie w dowolnym miejscu na Ziemi. Na wysokości ponad 19 tysięcy kilometrów nad Ziemią stale rozmieszczono co najmniej 24 aktywne satelity. Ich pozycje są obliczane w taki sposób, że dokładnie połowa z nich znajduje się zawsze na niebie nad dowolnym punktem planety. Głównym celem satelitów jest transfer informacji do ziemi o częstotliwościach w zakresie 1,1-1,5 GHz. Korzystając z tych danych i obliczeń matematycznych, odbiornik naziemny lub moduł GPS może obliczyć swoje położenie i aktualny czas.
W 2010 roku przywrócono alternatywny globalny system pozycjonowania GLONASS. Ma również 24 satelity i nadaje na częstotliwości 1,2-1,6 GHz.

Kanały
Liczba kanałów, z którymi działa moduł GPS wpływa na czas pierwszej korekty (TTFF). Ponieważ nie wiadomo, które satelity są w zasięgu wzroku, im więcej częstotliwości można sprawdzić natychmiast, tym szybsza będzie korekta. Po ustanowieniu połączenia lub otrzymaniu poprawki niektóre moduły wyłączają dodatkowe kanały, aby oszczędzać energię. Jeśli użytkownik nie ma nic przeciwko oczekiwaniu na dłużej, 12 lub 14 kanałów wystarcza do doskonałej pracy odbiornika.
Trilateracja
Jest to matematyczna metoda używana do obliczania pozycji z kilkoma punktami kontrolnymi. Aby odbiornik GPS obliczył dokładną pozycję i czas, musi nawiązać łączność z co najmniej 4 satelitami. Aby obliczyć odległość do obiektu metodą triangulacji, potrzebne są 2 punkty. Ale w przypadku GPS, musisz określić 4 wartości - szerokość, długość, wysokość i czas.
Określenie lokalizacji i czasu
Dane transmitowane na Ziemię z każdego satelity zawierają kilka różnych informacji, które pozwalają odbiornikowi GPS dokładnie obliczyć jego lokalizację i czas. Ważny element wyposażenia każdego z nich jest wyjątkowo dokładny. zegary atomowe. Dane dotyczące czasu są wysyłane na Ziemię wraz z pozycją orbitalną i czasem przybycia do różnych punktów orbity. Innymi słowy, moduł GPS odbiera znacznik czasu ze wszystkich widocznych satelitów, a także informacje o ich położeniu. Na podstawie tych danych można obliczyć odległość do każdego z nich. Jeśli antena widzi co najmniej 4 satelity, możesz dokładnie obliczyć położenie odbiornika.
Istnieje również strona globalnego systemu pozycjonowania. Oprócz powyższych elementów istnieją stacje naziemne, które mogą komunikować się z siecią satelitarną i niektórymi odbiornikami GPS. Taki system nazywa się segmentem kontrolnym i poprawia dokładność pomiaru. Jej przykładami są WAAS i DGPS. Pierwszy jest używany przez większość odbiorników i redukuje błąd do 5 m. Drugi wymaga odbiornika określonego typu i zapewnia błąd centymetra. Urządzenia tego typu są drogie i wydają się być większe, ponieważ wymagają dodatkowej anteny.

Dokładność Dodaj do koszyka
Dokładność pomiaru odbiornika GPS lub GLONASS zależy od wielu zmiennych, przede wszystkim od stosunku sygnału do szumu, położenia satelity, warunków pogodowych i obecności przeszkód, takich jak budynki i góry. Czynniki te mogą powodować błędy w obliczaniu lokalizacji użytkownika. Hałas zwykle powoduje błąd rzędu 1 do 10 m. Góry, budynki i inne obiekty, które mogą zakłócać sygnał z satelity, mogą powodować 3-krotnie większy błąd. Do normalnej pracy odbiornik GPS musi być w stanie odbierać sygnał z 4 satelitów. Łącze z pierwszym z nich pozwala uzyskać dane o almanachu, a więc i dostępność pozostałych. Chociaż możliwe jest zlokalizowanie za pomocą mniej niż 4 satelitów, błąd pomiaru może być dość duży. Najdokładniejsze określenie położenia występuje, gdy jest otwarty widok bezchmurnego nieba, wolny od przeszkód, z więcej niż 4 satelitami na górze. Aby zwalczyć te błędy, stworzono kilka narzędzi.
Wspomagany GPS
Jednym z tych systemów wsparcia jest Assisted GPS lub AGPS. Ta metoda wykorzystuje sieci bezprzewodowe (naziemne) do przekazywania sygnału satelitarnego, gdy jest on słaby lub niemożliwy do odbioru. AGPS pomaga w dwóch sprawach. Po pierwsze, dostarcza odbiorcy dane almanach i dokładny czas. Po drugie, wykorzystuje wyższą moc obliczeniową i dobry naziemny sygnał satelitarny do interpretacji uzyskanych fragmentarycznych informacji w celu zapewnienia bardziej niezawodnego określania pozycji. AGPS jest głównie realizowany przez zewnętrzne odbiorniki GPS zainstalowane na wieżach komórkowych. Komunikacja z nimi pozwala szybko dostroić się do satelity, a także uzyskać dokładniejsze informacje. Ta metoda jest używana w odbiornikach GPS dla "Androida" w telefonach komórkowych. Właśnie dlatego smartfony są często bardziej specyficznymi produktami. AGPS jest obecny w aparatach fotograficznych, monitorujących odbiorniki GPS i niektóre samochody. Jego zastosowanie jest najbardziej korzystne w miastach, w których sygnał w labiryncie budynków jest czasami dość trudny do odbioru.
Różnicowy GPS
Inną metodą jest zróżnicowany system geolokalizacji DGPS. Ten system pozycjonowania wykorzystuje również stacje naziemne. Różni się jednak tym, że znajduje różnicę między odczytem satelity a odbiornikiem. Stacje mogą być zlokalizowane w odległości do 370 km od odbiornika i ważne jest, aby pamiętać, że wraz ze wzrostem odległości zwiększa się dokładność pomiaru. DGPS jest wykonywana przez stację naziemną przesyłającą sygnał, który dyktuje błąd między rzeczywistą a zmierzoną pseudonimem. Ta wartość jest obliczana przez pomnożenie prędkości światła przez czas, jaki zabiera sygnał z satelity do odbiornika.
Przykładem jednego typu DGPS jest system szerokiego zasięgu WAAS. Został pierwotnie zaprojektowany do wspomagania odbiorników GPS samolotu. WAAS wykorzystuje system specjalnie zbudowanych stacji naziemnych. Istnieje zestaw standardów dokładności, które muszą spełniać pomiary. W 95% przypadków poziomy i pionowy błąd nie powinien przekraczać 7,6 m. Stacje naziemne wysyłają swoje pomiary do stacji czołowych, które co 5 sekund przesyłają poprawki do satelitów WAAS. Z satelity sygnał jest przesyłany z powrotem do odbiorników na Ziemi, gdzie poprawione dane są wykorzystywane do poprawy dokładności GPS. W niektórych miejscach WAAS może powodować błąd do 1 m w poziomie i 1,5 m w pionie. Chociaż system WAAS występuje tylko w Ameryce Północnej, podobne systemy istnieją w wielu innych częściach świata.

Formaty wiadomości
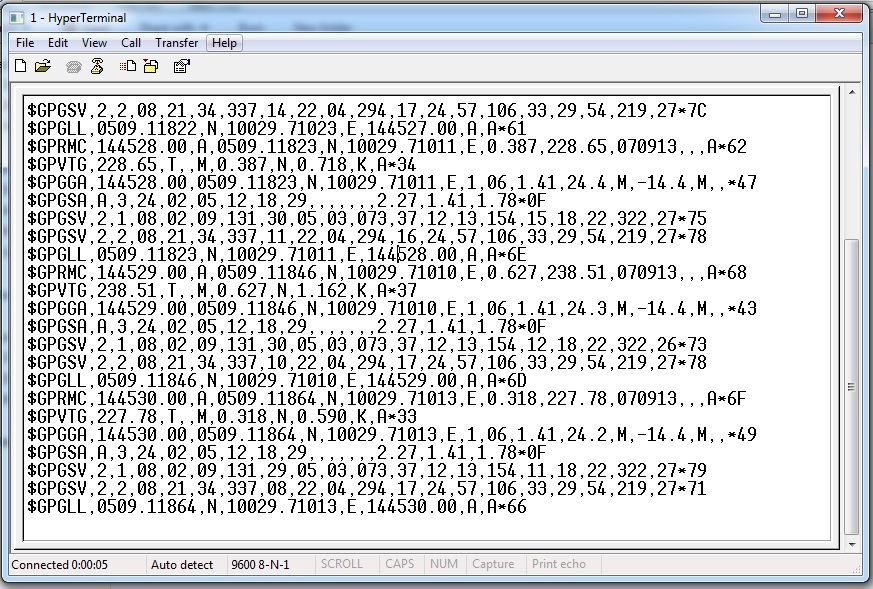
Dane GPS są wyświetlane w różnych formatach za pośrednictwem interfejsu szeregowego. Istnieją standardowe i niestandardowe (własne) formaty wiadomości. Niemal wszystkie odbiorniki GPS wysyłają dane NMEA. Jest to standard formatowania informacji w postaci łańcuchów, zwanych zdaniami. Każdy zawiera różne dane oddzielone przecinkami. W sumie istnieje 19 rodzajów takich propozycji. Oto przykład ciągu NMEA odebranego od odbiornika, który nawiązał komunikację z satelitą:
$ GPGGA, 235317.000,4003.9039, N, 10512.5793, W, 18,18,16,157,7, M, -20,7, M, 0000 * 5F.
Oferta zawiera następujące informacje:
- GMT: 23:53:17;
- szerokość geograficzna: północ, 40.039039 °;
- długość geograficzna: zachodnia, 10,5125793 °;
- liczba satelitów: 08;
- wysokość: 1577 m.
Dane są rozdzielane przecinkami, aby ułatwić czytanie i analizę komputerów i mikrokontrolerów. Są wysyłane do portu szeregowego w odstępach zwanych szybkościami aktualizacji. Większość odbiorników aktualizuje te informacje raz na sekundę (tj. O częstotliwości 1 Hz), ale najlepsze odbiorniki GPS mogą wykonywać wiele aktualizacji na sekundę. W przypadku nowoczesnych modeli wartość ta wynosi 5-20 Hz.
Czytanie danych
Większość modułów GPS jest wyposażona w port szeregowy, który umożliwia podłączenie ich do mikrokontrolera lub komputera.
Po włączeniu urządzenia dane NMEA (lub wiadomości w innym formacie) są wysyłane z szeregowego złącza nadawczego (TX) z określoną szybkością transmisji i szybkością aktualizacji, nawet jeśli nie ma odbioru z satelity. Aby mikrokontroler mógł odczytać informacje, należy podłączyć pin TX GPS do wejścia RX. Aby skonfigurować moduł, należy podłączyć jego wejście RX do wyjścia TX urządzenia sterującego.
Mikrokontroler zazwyczaj analizuje dane NMEA. Analiza wniosku polega na wyciągnięciu z niego informacji.
Na przykład mikrokontroler musi tylko odczytać wysokość GPS. Zamiast zajmować się całym tekstem, analizuje zdanie GPGGA i wybiera tylko wysokość. Po wybraniu niezbędnych informacji można manipulować nimi w celu wykonywania innych czynności.
Platforma Arduino może również łatwo analizować dane NMEA za pomocą biblioteki Tiny GPS.

Połącz się z komputerem
Prostym sposobem bezpośredniego przeglądania danych NMEA jest użycie odbiornika GPS do laptopa lub komputera. Aby utworzyć połączenie, konieczne jest jedynie zasilanie urządzenia geolokalizacyjnego i podłączenie kołka TX modułu zewnętrznego do wejścia RX komputera.
Możliwe jest również podłączenie odbiornika GPS do portu USB. Jednocześnie może być zasilany zarówno z własnego źródła, jak i poprzez połączenie z komputerem PC. W pierwszym przypadku zwolniona linia służy do wykrywania połączenia odbiornika GPS USB z hostem. Po podłączeniu do komputera zasilanie jest dostarczane przez uniwersalną magistralę szeregową, więc żadne dodatkowe źródło nie jest wymagane.
Ponadto odbiornik Bluetooth-GPS zapewnia bezprzewodową komunikację zarówno z komputerami PC, jak iz kompatybilnymi urządzeniami tego samego producenta. Pozwala to na szybką wymianę wspólnych danych, takich jak trasy i punkty trasy.
Po podłączeniu należy otworzyć program terminala szeregowego, ustawiając prędkość przesyłu równą prędkości modułu GPS. Nawet jeśli odbiornik nie nawiązał komunikacji z satelitą, na ekranie pojawi się strumień zdań NMEA.

Konfiguracja odbiornika
Aby skonfigurować odbiornik GPS i GLONASS, należy znać typ zainstalowanego w nim mikroukładu. Chipset zawiera potężny procesor, który jest odpowiedzialny za interfejs użytkownika, wszystkie obliczenia, a także obwody anteny analogowej. Ponadto chipset umożliwia odbieranie danych w celu skonfigurowania parametrów, takich jak prędkość aktualizacji, szybkość transferu, wybór oferty itp.
Aby wysyłać polecenia do odbiornika przez port szeregowy, potrzebny jest zestaw poleceń lub instrukcja obsługi. Ale zanim zanurkujesz w badaniu poleceń dla konkretnego modułu, musisz sprawdzić dostępność oprogramowania, co znacznie ułatwia pracę z urządzeniem i jego konfiguracją.
Niektóre chipsety pozwalają na użycie alternatywnych protokołów, takich jak binarne SiRF, UBX lub własne wiadomości. Te protokoły zawierają podobne informacje, ale wymieniają dane w postaci kodu binarnego (zamiast ASCII), aby zapewnić szybszą komunikację.
Podczas komunikacji z odbiornikiem GPS polecenia muszą kończyć się sumą kontrolną. W większości przypadków w tym celu dla każdego zdania należy uruchomić polecenie XOR.
Antena
Mały moduł GPS odbiera sygnały z satelitów znajdujących się w odległości 19 tys. Km, które znajdują się nie tylko nad głową, ale także w dowolnym miejscu na niebie. Aby zwiększyć wydajność anteny i satelitów, potrzebujesz bezpośredniej widoczności. Pogoda, chmury, zamiecie nie powinny wpływać na sygnał, ale drzewa, budynki, góry, dach nad głową wywołają niechcianą ingerencję, a na tym ucierpi dokładność GPS.
Opracowano wiele opcji anten. Jedną z najczęstszych jest ceramiczna antena łatkowa. Ma niski profil, niski koszt i kompaktowość, ale w porównaniu z innymi typami ma gorzej. Aby uzyskać dobry sygnał, musi on być skierowany w górę do otwartego nieba, tj. Gdy wzmocnienie jest maksymalne.
Anteny śrubowe są używane w niektórych modułach GPS. Zajmują więcej miejsca, ale ich kształt pozwala uzyskać lepszy sygnał w dowolnej orientacji z powodu mniejszego wzmocnienia.
Niektóre moduły używają anten SMA. Umożliwia to zamontowanie ich w miejscach innych niż lokalizacja samego odbiornika, co jest przydatne w przypadkach, gdy główny system nie ma dostępu do otwartego nieba (na przykład w budynku lub samochodzie).